Captação e Processamento de Imagens Obtidas por Drone/VANT para Mapeamento
A rápida miniaturização e redução de custos de diversos sensores de imageamento presentes atualmente no mercado, que até então eram inacessíveis à maior parte dos profissionais, bem como a explosão de uma grande diversidade de plataformas com diferentes capacidades de atuação, podem ser consideradas fatores primordiais à popularização dos sistemas hoje conhecidos como drones, VANTs (Veículos Aéreos Não Tripulados) ou ainda ARPs (Aeronaves Remotamente Pilotadas), termo oficial adotado pela ANAC e DECEA. Dentre as vantagens oferecidas por estes sistemas, quando comparados aos mais convencionais (como a aerofotogrametria realizada por aeronaves tripuladas), podem ser destacados uma melhor resolução espacial das imagens, possibilitando a identificação, discriminação e classificação de objetos pequenos; menores custos; maior flexibilidade para a aquisição dos dados permitindo a geração de imagens no momento de interesse ou com a frequência necessária, viabilizando assim um avanço de grande importância para estudos e monitoramento de processos de rápido desenvolvimento.
Em contrapartida, e comum a todo processo inovador, surgem, sobretudo nos conservadores, uma desconfiança frente a tantas vantagens prometidas. E com ela, algumas indagações quanto a qualidade resultante do mapeamento gerado utilizando estes equipamentos.
Em um campo de trabalho em que a precisão pode determinar situações de risco, esta desconfiança se faz justificável, e a preocupação com a precisão do produto final é altamente recomendável. Porém, alguns pontos precisam ser analisados com cautela quando o assunto é precisão. Desta forma, neste artigo buscaremos esclarecer estes e outros questionamentos sobre os conceitos básicos de precisão de mapeamento utilizando drones.
As primeiras questões que se colocam são: “Todo mapeamento precisa ser altamente preciso? Qual a precisão que podemos esperar de um mapeamento com drones? Quais serão os fatores que irão influenciar na qualidade final dos produtos?”.
A precisão de mapeamentos realizados por drones pode ser analisada por dois conceitos: precisão relativa e precisão absoluta. Por precisão relativa entendemos o grau de exatidão de um determinado ponto de um mapa em relação a outros pontos dentro desse mesmo mapa. Em outras palavras, em um mapa com alta precisão relativa espera-se que uma distância entre dois pontos que mede 5 km no mundo real, também possa ser medida no mapa com 5 km. Já a precisão absoluta ou também chamada, precisão global, refere-se a exatidão em que um ponto de um mapa corresponde a um sistema de coordenadas fixo no mundo real. Se um mapa tem um alto nível de precisão global, a latitude e a longitude de um ponto nesse mapa corresponderão com bastante precisão às coordenadas reais ou obtidas por um GNSS de alta precisão.
Entendendo estes conceitos podemos determinar qual o tipo de precisão o mapeamento a ser realizado deve ter, de acordo com a aplicação que daremos. Dessa forma já é possível respondermos ao primeiro questionamento: nem todo mapeamento precisa ser altamente preciso, sendo possível que alguns projetos exigirão um alto nível de precisão global, enquanto em outros casos, a precisão relativa será suficiente.
Assim, antes de questionarmos a precisão do mapeamento, é preciso ter em mente qual será a aplicação do projeto e seus reais objetivos, pois serão estes que irão determinar o nível e tipo de precisão necessários.
Embora cada projeto deva ser analisado segundo suas particularidades, listamos alguns exemplos de projetos de acordo com o nível de precisão geralmente requerido a eles.
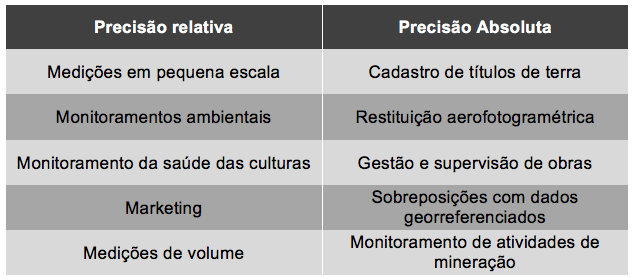
Tabela 1. Exemplos de aplicações e tipos de precisão requeridas geralmente.
Caso uma alta precisão global ou acurácia seja realmente necessária para atender ao objetivo do projeto de mapeamento, então a escolha dos equipamentos a serem utilizados deve ser feita com cautela e alguns detalhes importantes precisam ser considerados no planejamento da missão.
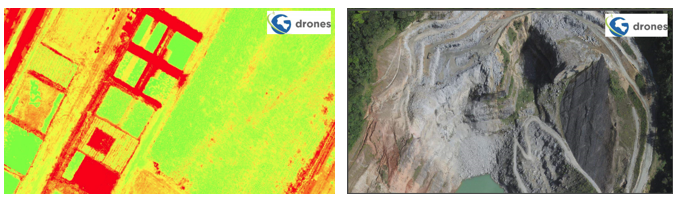
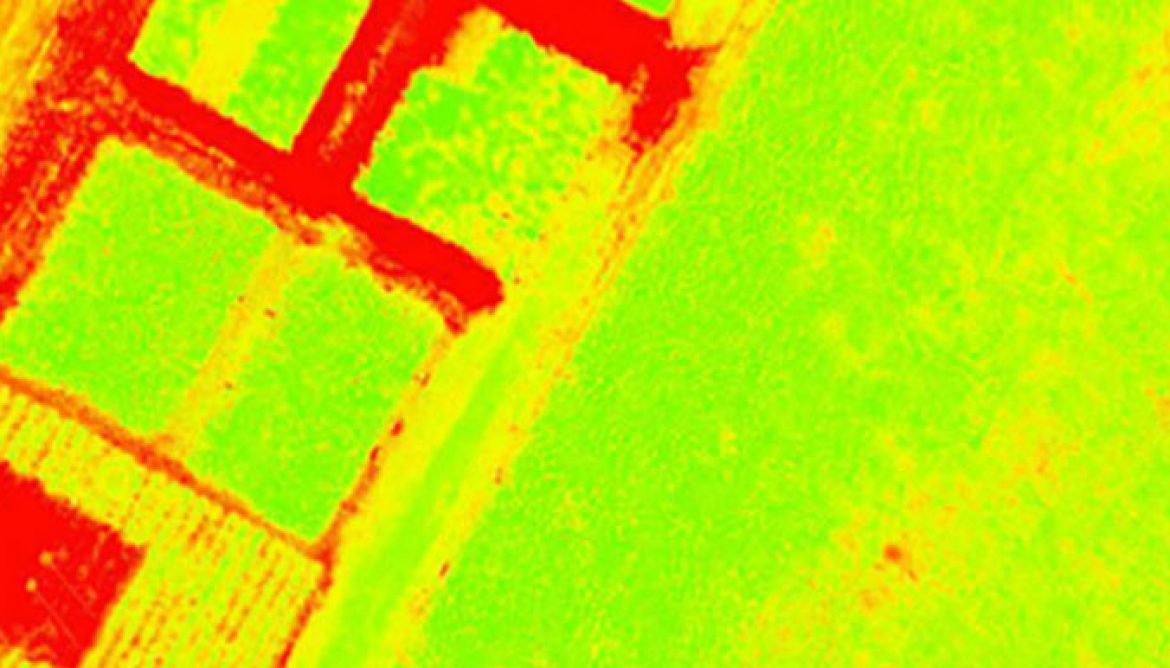
Figura 1. Imagem de área agrícola utilizada para monitoramento da cultura. Exemplo de mapeamento em que a precisão relativa pode ser suficiente.
Figura 2. Imagem utilizada para monitoramento de atividades de mineração. Exemplo em que a precisão global normalmente é necessária.
A primeira decisão importante a ser tomada para este tipo de mapeamento é o tamanho do GSD (Ground Sample Distance) necessário ao projeto. O GSD trata-se do tamanho que uma célula de pixel representa do terreno. Ou seja, é a distância na superfície terrestre, em escala real, que é registrada em um pixel na imagem. Quanto menor for o GSD, maior é a resolução da imagem e, portanto, mais definidos serão os detalhes da mesma. O GSD é diretamente dependente da altura de voo em relação ao solo, e dos parâmetros da câmera utilizada: distância focal e tamanho do pixel no sensor. Uma vez determinado o tamanho do GSD necessário, a altura de voo poderá ser calculada e o tipo de equipamento mais adequado escolhido.
Neste aspecto, deve ser lembrado que um voo a baixa altitude (para garantir maior GSD), exigirá do equipamento a realização de um maior número de linhas no trajeto, o que consequentemente aumenta o tempo de voo. Neste ponto, cabe destacar as duas principais categorias de equipamento, os de asa fixa (aviões) ou os multirrotores. A primeira categoria, por possuir maior eficiência aerodinâmica e velocidade, costumam ser os mais adequados para sobrevoos de áreas maiores, na casa de milhares de hectares. Por outro lado, os multirrotores são mais fáceis de operar e versáteis, e são melhor aplicados para mapeamentos em áreas menores e modelagem tridimensional de estruturas como pontes e prédios.
Por exemplo, o asa fixa elétrico G Wing200 pode cobrir área de até 2.000 ha por voo, a 600m de altura, com autonomia de missão de 2 horas. O multirrotor quadricóptero G Q45 tem autonomia de 45 minutos e a 300 metros de altura, permite o recobrimento de uma área de 250 ha por voo.

Figura 3. Drone Multirrotor modelo G Q45
Figura 4. Drone Asa fixa modelo G Wing200
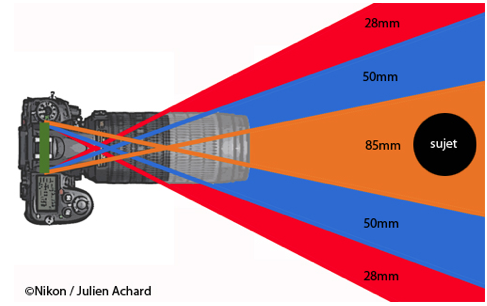
Além da plataforma, a escolha da câmera utilizada exercerá uma influência significativa sobre o resultado. Assim, é muito importante considerar qual câmera será melhor para cumprir um projeto específico com base na resolução do pixel e sua distância focal, e sobretudo, na informação que se deseja extrair das imagens posteriormente. Câmeras de 20 megapixels com distância focal equivalente a 28 mm podem apresentar um bom resultado com os novos softwares de processamento de imagens. Além disso, é desejável que a distância focal da lente não seja variável.
Se não forem utilizados pontos de apoio, os produtos obtidos por meio de aerofotogrametria por drones estarão vinculados à acurácia posicional dos GNSS das aeronaves. Estes podem ser de diferentes tipos: C/A, L1, L1 e L2. A maioria das aeronaves possui apenas receptores GNSS de navegação (C/A). Os produtos obtidos, portanto, possuirão erros compatíveis com estes sistemas de posicionamento, podendo ser da ordem de 5 metros para planimetria e 15 metros para altimetria. Cabe destacar que já há drones no mercado já com receptores GNSS que podem geotagear as fotos por método RTK ou PPK.
Quando utilizados pontos de apoio em campo, a acurácia normalmente será relacionada ao GSD das imagens, sendo a planimétrica dada por 1,5 vezes o tamanho do GSD e a altimétrica três vezes essa dimensão. Se, após determinado o tamanho do GSD, for constatado que a precisão global do projeto deverá ser superior a determinada por estes cálculos então o uso de pontos de apoio em solo será necessário.
Os pontos de apoio, ou GCPs (Ground Control Points), são marcações bem identificáveis em mais de uma fotografia e têm como função realizar a ligação entre as mesmas a partir de uma coordenada espacial precisa (no nível centimétrico), atribuída a este ponto. Quanto maior o número de fotos em que aparecem estes pontos (determinado pela sobreposição entre as imagens, configurado no planejamento do voo) melhor será o resultado final desta ligação. Embora existam muitas propostas de qual o número ideal de pontos de apoio espalhados pela área a ser mapeada, em artigos e testes, verifica-se que para áreas de dezenas ou centenas de hectares, em geral, a partir de dez pontos de apoio, a melhoria da acurácia passa a ser praticamente insignificante. Em terrenos com relevo mais movimentado e grande amplitude altimétrica, ou em áreas maiores, exige-se um número maior de pontos.
Para checagem da acurácia, são usados pontos de controle. Tratam-se de pontos adquiridos no terreno também, mas que não são utilizados no ajuste e alinhamento das fotografias geradas pela ARP, mas sim para comparação das coordenadas e altimetria resultantes no mesmo ponto representado na nuvem de pontos ou no Modelo Digital do Terreno.
Para aquisição de coordenadas e altimetria em solo e criação dos pontos de apoio e controle, os métodos podem ser diversos, embora hoje, o mais comum é a obtenção a partir de um par de receptores GNSS pelo método RTK.
Há outros fatores que vão influenciar na acurácia dos produtos cartográficos obtidos a partir de aerofotogrametria com drones, como por exemplo parâmetros de processamentos e procedimentos nos softwares que transformam as fotografias digitais em nuvens de pontos, MDS, MDT (TIN, matricial e curvas de nível) e ortomosaicos. Há cada vez mais opções de softwares no mercado que se valem de algoritmos como SIFT, SURF e BRISK, e visão computacional para a extração de keypoints nas imagens.
Deste modo, é importante destacar que atualmente os softwares já apresentam resultados bons para a geração dos produtos básicos supracitados. O desafio principal das empresas de mapeamento por drones hoje está em extrair informações e realizar classificações de forma mais automatizada nestes produtos, para ganho de escala, agregar valor aos serviços e solucionar problemas de clientes.
É crescente o número de sensores construídos especialmente para drones, mas a enorme diversidade de condições de luminosidade, altura, etc, em que as imagens são tomadas, juntamente com a altíssima resolução espacial destas, inserem problemas para criação de rotinas de processamento e classificação dos ortomosaicos ou ainda das nuvens de pontos.
Em artigos futuros desejamos discorrer mais sobre plataformas, sensores e métodos de processamento, assuntos vastos e altamente dinâmicos hoje.
Como mencionado, o mapeamento com drones possui algumas vantagens, sobretudo em termos de resolução espacial, custos e flexibilidade de tempo, quando comparado com outras plataformas de sensoriamento remoto, mas trata-se de mais uma ferramenta de mapeamento, a qual coexistirá com métodos já consagrados.
Considerando-se que os riscos de queda de uma ARP podem ser minimizados utilizando-se equipamentos e procedimentos apropriados de segurança, e que o uso das aeronaves será de interface cada vez mais intuitiva, entende-se que o uso destas plataformas em diversas aplicações crescerá vertiginosamente nos próximos anos.
A recente publicação pela ANAC do Regulamento Brasileiro de Aviação Civil Especial – RBAC-E n°94, em maio de 2017, juntamente com a criação do portal SARPAS para solicitação de autorização de voos, ocorrida em dezembro de 2016, pelo DECEA, foram passos importantes para a regulamentação de atividades comerciais com ARPs no Brasil. Atualmente a discussão no setor é se o aerolevantamento com drones deve também cumprir todas as exigências do Ministério da Defesa que são feitas normalmente para aeronaves tripuladas.
Superadas as questões legais e os desafios técnicos, levantamentos topográficos e mapeamentos temáticos dos mais variados aspectos com drones, certamente farão parte da formação profissional do cartógrafo e do agrimensor.
Artigo para publicação na revista digital da Apeaesp – Associação Profissional dos Engenheiros Agrimensores no Estado de São Paulo.
Referência
SCHROTH, F. Accuracy in Drone Mapping: What You Need to Know. Disponível em: <http://dronelife.com/2017/02/06/accuracy-drone-mapping-need-know/>. Acesso em abr. 2017.
Artigo para publicação na revista digital da Apeaesp – Associação Profissional dos Engenheiros Agrimensores no Estado de São Paulo.
George Alfredo Longhitano – Mestre em Geoprocessamento – USP – diretor da G drones
Luana Thayza de Oliveira – Mestre em Sensoriamento Remoto – INPE – Técnica em processamento de imagens da G drones
Bruno Defane Borges – Mestre em Ecologia – UNESP – Piloto e técnico da G drones
